
| Line 137: | Line 137: | ||
:<math> |
:<math> |
||
\begin{align} |
\begin{align} |
||
| − | (M_0 + \sum_{i=1}^{P_M} p^M_i M_i)\ddot{x}(t) + ( |
+ | (M_0 + \sum_{i=1}^{P_M} p^M_i M_i)\ddot{x}(t) + (E_0 + \sum_{i=1}^{P_E} p^E_i E_i)\dot{x}(t) + (K_0 + \sum_{i=1}^{P_K} p^K_i K_i)x(t) &= B u(t), \\ |
y(t) &= C x(t), |
y(t) &= C x(t), |
||
\end{align} |
\end{align} |
||
| Line 146: | Line 146: | ||
<math>M_0 \in \mathbb{R}^{N \times N}</math>, |
<math>M_0 \in \mathbb{R}^{N \times N}</math>, |
||
<math>M_i \in \mathbb{R}^{N \times N}</math>, |
<math>M_i \in \mathbb{R}^{N \times N}</math>, |
||
| − | <math> |
+ | <math>E_0 \in \mathbb{R}^{N \times N}</math>, |
| − | <math> |
+ | <math>E_j \in \mathbb{R}^{N \times N}</math>, |
<math>K_0 \in \mathbb{R}^{N \times N}</math>, |
<math>K_0 \in \mathbb{R}^{N \times N}</math>, |
||
<math>K_k \in \mathbb{R}^{N \times N}</math>, |
<math>K_k \in \mathbb{R}^{N \times N}</math>, |
||
Revision as of 11:51, 9 February 2019
 Note: This page has not been verified by our editors.
Note: This page has not been verified by our editors.
Benchmark Model Overview
This page outlines the types of models that are used as benchmark systems.
For this general summary we assume an input  ,
a state
,
a state  and an output
and an output  .
.
Linear Time-Invariant System
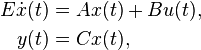
with:
 ,
,
 ,
,
 ,
,
 .
.
Linear Time-Varying System

with:
 ,
,
 ,
,
 ,
,
 .
.
Quadratic-Bilinear System

with:
,
,
,
 ,
,
 ,
.
,
.
Nonlinear Time-Invariant System

with:
,
,
,
,
 .
.
Affine Parametric Linear Time-Invariant System
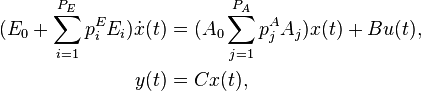
with:
 ,
,
 ,
,
 ,
,
 ,
,
.
,
,
.
Second-Order System

with:
 ,
,
,
,
 ,
,
.
,
,
.
Nonlinear Second-Order System

with:
,
,
,
,
,
.
Affine Parametric Second-Order System

with:
 ,
,
 ,
,
,
,
 ,
,
 ,
,
 ,
,
.
,
,
.