No edit summary |
|||
| (50 intermediate revisions by 7 users not shown) | |||
| Line 1: | Line 1: | ||
[[Category:benchmark]] | [[Category:benchmark]] | ||
[[Category: | [[Category:Parametric]] | ||
[[Category:Sparse]] | [[Category:Sparse]] | ||
[[Category:linear]] | [[Category:linear]] | ||
[[Category:time | [[Category:time varying]] | ||
[[Category:first differential order]] | [[Category:first differential order]] | ||
[[Category:ODE]] | [[Category:ODE]] | ||
[[Category:MIMO]] | |||
[[Category:CRC-TR-96]] | |||
{{Infobox | |||
|Title = Vertical Stand | |||
|Benchmark ID = | |||
* verticalStandParametric_n16626m6q27 | |||
* verticalStandSwitched_n16626m6q27 | |||
|Category = misc | |||
|System-Class = AP-LTV-FOS | |||
|nstates = 16626 | |||
|ninputs = 6 | |||
|noutputs = 27 | |||
|nparameters = | |||
* 234 | |||
* 11 | |||
|components = A, B, C, E | |||
|License = NA | |||
|Creator = [[User:Lnor]] | |||
|Editor = | |||
* [[User:Lnor]] | |||
* [[User:Saak]] | |||
* [[User:Himpe]] | |||
|Zenodo-link = NA | |||
}} | |||
==Description== | ==Description== | ||
| Line 17: | Line 39: | ||
</figure> | </figure> | ||
The '''vertical stand''' (see | The '''vertical stand''' (see Fig. 1) represents a structural part of a machine tool. A pair of guide rails is located on one of the surfaces of this structural part, | ||
and during the machining process, a tool slide is moved to different positions along these rails. The machining process produces a certain amount of heat which is transported through the slide structure into the '''vertical stand'''. This heat source is considered to be a temperature input <math>q_{th}(t)</math> at the guide rails. The induced temperature field, denoted by <math> T </math> is modeled by the [[wikipedia:heat equation|heat equation]] | |||
:<math> | :<math> | ||
c_p\rho\frac{\partial{T}}{\partial{t}} | c_p\rho\frac{\partial{T}}{\partial{t}}-\Delta T=0 | ||
</math> | </math> | ||
| Line 26: | Line 49: | ||
:<math> | :<math> | ||
\lambda\frac{\partial T}{\partial n}= | \lambda\frac{\partial T}{\partial n}=q_{th}(t) \qquad\qquad\qquad | ||
</math> on <math> \Gamma_{ | </math> on <math> \Gamma_{rail} </math> (surface where the tool slide is moving on the guide rails), | ||
describing the heat transfer between the tool slide and the '''vertical stand'''. | describing the heat transfer between the tool slide and the '''vertical stand'''. | ||
The heat transfer to the ambiance is given by the fixed [[wikipedia:Robin_boundary_condition|Robin-type boundary condition]] | The heat transfer to the ambiance is given by the locally fixed [[wikipedia:Robin_boundary_condition|Robin-type boundary condition]] | ||
:<math> | :<math> | ||
\lambda\frac{\partial T}{\partial n} | \lambda\frac{\partial T}{\partial n}=\kappa_i(T-T_i^{ext}) | ||
</math> on <math> \Gamma_{ | </math> on <math> \Gamma_{amb} </math> (remaining boundaries). | ||
The motion driven temperature input and the associated change in the temperature field <math>T</math> lead to deformations <math>u</math> within the stand structure. | The motion driven temperature input and the associated change in the temperature field <math>T</math> lead to deformations <math>u</math> within the stand structure. Further, it is assumed that no external forces <math>q_{el}</math> are induced to the system, such that the deformation is purely driven by the change of temperature. Since the mechanical behavior of the machine stand is much faster than the propagation of the thermal field, it is sufficient to consider the stationary [[wikipedia:Linear_elasticity|linear elasticity]] equations | ||
Since the mechanical behavior of the machine stand is | |||
stationary linear elasticity equations | |||
:<math> | :<math> | ||
\begin{align} | \begin{align} | ||
-\operatorname{div}(\sigma(u)) &= | -\operatorname{div}(\sigma(u)) &=q_{el}=0&\text{ on }\Omega,\\ | ||
\varepsilon(u) &= {\mathbf{C}}^{-1}:\sigma(u)+\beta(T-T_{ref})I_d&\text{ on }\Omega,\\ | \varepsilon(u) &= {\mathbf{C}}^{-1}:\sigma(u)+\beta(T-T_{ref})I_d&\text{ on }\Omega,\\ | ||
{\mathbf{C}}^{-1}\sigma(u) &=\frac{1+\nu}{E_u}\sigma(u)-\frac{\nu}{E_u}\text{tr}(\sigma(u))I_d&\text{ on }\Omega,\\ | {\mathbf{C}}^{-1}\sigma(u) &=\frac{1+\nu}{E_u}\sigma(u)-\frac{\nu}{E_u}\text{tr}(\sigma(u))I_d&\text{ on }\Omega,\\ | ||
| Line 68: | Line 89: | ||
</math> | </math> | ||
with <math>t>0</math> and a system dimension of <math>n=16\,626</math> degrees of freedom and <math>m=6</math> inputs. Note that <math>A(.)\in\mathbb{R}^{n\times n}</math> and <math>B(.)\in\mathbb{R}^{n\times m}</math> are time-dependent matrix-valued functions. That is, the underlying model is represented by a linear time-Varying (LTV) state-space system. More precisely, here the time dependence originates from the change of the boundary condition on <math>\Gamma_{ | with <math>t>0</math> and a system dimension of <math>n=16\,626</math> degrees of freedom and <math>m=6</math> inputs. Note that <math>A(.)\in\mathbb{R}^{n\times n}</math> and <math>B(.)\in\mathbb{R}^{n\times m}</math> are time-dependent matrix-valued functions. That is, the underlying model is represented by a linear time-Varying (LTV) state-space system. More precisely, here the time dependence originates from the change of the boundary condition on <math>\Gamma_{rail}</math> due to the motion of the tool slide. The system input is, according to the boundary conditions, given by | ||
:<math> | :<math> | ||
z_i=\begin{cases} | z_i=\begin{cases} | ||
q_{th}(t), i=1,\\ | |||
\kappa_i T_i^{ext}(t), i=2,\dots,6 | |||
\end{cases}. | \end{cases}. | ||
</math> | </math> | ||
| Line 98: | Line 119: | ||
where the modified output matrix <math>\tilde{C}=CM^{-1}KT(t)</math> includes the entire elasticity information. | where the modified output matrix <math>\tilde{C}=CM^{-1}KT(t)</math> includes the entire elasticity information. | ||
The motion of the tool slide and the associated variation of the affected input boundary are modeled by two different system representations. The following specific model representations have been developed and investigated in <ref name="morLanSB14" />, <ref name="LanSB15" />. | The motion of the tool slide and the associated variation of the affected input boundary are modeled by two different system representations. The following specific model representations have been developed and investigated in <ref name="morLanSB14" />, <ref name="LanSB15" />, <ref name="Lan17" />. | ||
===Switched | ===Switched Linear System=== | ||
<figure id="fig:segm"> | <figure id="fig:segm"> | ||
[[File:Slide_stand_scheme_new.pdf|thumb|right|220px|<caption>Schematic segmentation</caption>]] | [[File:Slide_stand_scheme_new.pdf|thumb|right|220px|<caption>Schematic segmentation</caption>]] | ||
</figure> | </figure> | ||
For the model description as a switched linear system, the guide rails of the machine stand are modeled as fifteen equally distributed horizontal segments with a height of <math>99mm</math> (see a schematic depiction in | For the model description as a switched linear system, the guide rails of the machine stand are modeled as fifteen equally distributed horizontal segments with a height of <math>99mm</math> (see a schematic depiction in Fig. 2). Any of these segments is assumed to be completely covered by the tool slide if its midpoint (in y-direction) lies within the height of the slide. On the other hand, each segment whose midpoint is not covered is treated as not in contact and therefore the slide always covers five to six segments at each time. Still, the covering of six segments does not have a significant effect on the behavior of the temperature and displacement fields. Due to that and in order to keep the number of subsystems small, this scenario will be neglected. Then, in fact eleven distinct, discrete boundary condition configurations for the stand model that are prescribed by the geometrical dimensions of the segmentation and the tool slide are defined. These distinguishable setups define the subsystems | ||
:<math> | :<math> | ||
\begin{align} | \begin{align} | ||
E\dot{T}&=A_{\alpha}T+B_{\alpha}z,\\ | E\dot{T}(t)&=A_{\alpha}T(t)+B_{\alpha}z(t),\\ | ||
y&=\tilde{C}T, | y(t)&=\tilde{C}T(t), | ||
\end{align} | \end{align} | ||
</math> | </math> | ||
of the switched linear system <ref name=Lib03/>, where <math>\alpha</math> is a piecewise constant function of time, which takes its value from the index set <math>\mathcal{J}=\{1,\dots,11\}</math>. To be more precise, the switching signal <math>\alpha</math> implicitly maps the slide position to the number of the currently active subsystem. | of the switched linear system <ref name=Lib03/>, where <math>\alpha</math> is a piecewise constant function of time, which takes its value from the index set <math>\mathcal{J}=\{1,\dots,11\}</math>. To be more precise, the switching signal <math>\alpha</math> implicitly maps the slide position to the number of the currently active subsystem. | ||
===Linear Parameter- | ===Linear Parameter-Varying System=== | ||
For the parametric model description, the finite element nodes located at the guide rails are clustered with respect to their y-coordinates. This results in <math>233</math> distinct layers in y-direction. According to these layers, the matrices <math>A(t)=A(\mu(t)), B(t)=B(\mu(t)) </math> are defined in a parameter-affine representation of the form | |||
For the parametric model description, the | |||
:<math> | :<math> | ||
\begin{align} | \begin{align} | ||
| Line 124: | Line 143: | ||
\end{align} | \end{align} | ||
</math> | </math> | ||
with the scalar functions <math>f_i,g_j\in\{0,1\}, i=1,...,m_A, j=1,...,m_B</math> selecting the active layers, covered by the tool slide. Note that in general the number of summands of these representations need not | with the scalar functions <math>f_i,g_j\in\{0,1\}, i=1,...,m_A, j=1,...,m_B</math> selecting the active layers, covered by the tool slide and <math>\mu(t)</math> being the position of the middle point (vertical / y-direction) of the slide. The matrix <math>A_0\in\mathbb{R}^{n\times n}</math> consists of the discretization of the [[wikipedia:Laplace operator|Laplacian]] <math>\Delta</math>, as well as the discrete portions from the Robin-type boundaries that correspond to the temperature exchange with the ambiance. The remaining summands <math>A_j\in\mathbb{R}^{n\times n},~j=1,...,m_A</math> denote the discretization associated to the moving Robin-type boundaries. For the representation of the input matrix, the summand <math>B_0\in\mathbb{R}^{n\times 6}</math> consists of a single zero column followed by five columns related to the inputs <math>z_i,~i=2,...,6</math>. The remaing matrices <math>B_j,~j=1,...,m_B</math> are built by a single column corresponding to the different layers followed by a zero block of dimension <math>n\times 5</math> designated to fit the dimension of <math>B_0</math>. | ||
Note that in general, the number of summands of these representations need not be equal. Still, according to the number of layers, for this example, it holds that <math>m_A=m_B=233</math>. For more details on parametric models, see e.g., <ref name="morBauBBetal11" /> and the references therein. | |||
Then, the final linear parameter-varying (LPV) reformulation of the above LTV system reads | Then, the final linear parameter-varying (LPV) reformulation of the above LTV system reads | ||
:<math> | :<math> | ||
\begin{align} | \begin{align} | ||
E\dot{T}&=A(\mu)T+B(\mu)z,\\ | E\dot{T}(t)&=A(\mu)T(t)+B(\mu)z(t),\\ | ||
y&=\tilde{C}T. | y(t)&=\tilde{C}T(t). | ||
\end{align} | \end{align} | ||
</math> | </math> | ||
| Line 183: | Line 204: | ||
:<math> | :<math> | ||
E,A_j\in\mathbb{R}^{n\times n},j=1,...,234, | E,A_j\in\mathbb{R}^{n\times n},j=1,...,234, B_{rail}\in\mathbb{R}^{n\times 233}, B_{amb}\in\mathbb{R}^{n\times 5}</math> and <math>\tilde{C}\in\mathbb{R}^{q\times n}, q=27, n=16\,626, | ||
</math> | </math> | ||
as well as a file ''ycoord_layers.mtx'' containing the y-coordinates of the layers located on the guide rails. | as well as a file ''ycoord_layers.mtx'' containing the y-coordinates of the layers located on the guide rails. | ||
Here <math> | Here <math>B_{rail} </math> contains all columns corresponding to the different layers on the guide rails and <math>B_{amb}</math> correlates to the boundaries where the ambient temperatures act on. | ||
In order to set up the parameter dependent matrices <math>A(\mu),B(\mu)</math> the active matrices <math>A_i</math> and columns <math> | In order to set up the parameter dependent matrices <math>A(\mu),B(\mu)</math> the active matrices <math>A_i</math> and columns <math>B_{rail}(:,i)</math> associated to the covered layers have to be identified by the current position <math>\mu(t)</math> (vertical middle point of the slide) and the geometrical dimensions of the tool slide and the y-coordinates of the different layers given in ''ycoord_layers.mtx''. Then, <math>B(\mu)</math> has to be set up in the form <math>B(\mu)=[\sum_{i\in id_{active}}\!\!\!\!\!B_{rail}(:,i),B_{amb}]</math>, where <math>id_{active}</math> denotes the set of covered layers and their corresponding columns in <math>B_{rail}</math>. | ||
| Line 200: | Line 221: | ||
and the fifth column of <math>B_{surf}</math> includes the missing upper <math>(y\in[1\,340,2\,010]mm)</math> part. | and the fifth column of <math>B_{surf}</math> includes the missing upper <math>(y\in[1\,340,2\,010]mm)</math> part. | ||
--> | --> | ||
The matrices have been re-indexed (starting with 1) for [[MORB]]. | |||
==Citation== | ==Citation== | ||
| Line 206: | Line 229: | ||
* For the benchmark itself and its data: | * For the benchmark itself and its data: | ||
::The MORwiki Community, '''Vertical Stand'''. MORwiki - Model Order Reduction Wiki, 2018. | ::The MORwiki Community, '''Vertical Stand'''. MORwiki - Model Order Reduction Wiki, 2018. https://modelreduction.org/morwiki/Vertical_Stand | ||
@MISC{morwiki_vertstand, | @MISC{morwiki_vertstand, | ||
| Line 212: | Line 235: | ||
title = {Vertical Stand}, | title = {Vertical Stand}, | ||
howpublished = {{MORwiki} -- Model Order Reduction Wiki}, | howpublished = {{MORwiki} -- Model Order Reduction Wiki}, | ||
url = <nowiki>{ | url = <nowiki>{https://modelreduction.org/morwiki/Vertical_Stand}</nowiki>, | ||
year = 2014 | year = 2014 | ||
} | } | ||
| Line 241: | Line 264: | ||
<ref name="GalGM11"> A. Galant, K. Großmann, and A. Mühl, Model Order Reduction (MOR) for | <ref name="GalGM11"> A. Galant, K. Großmann, and A. Mühl, Model Order Reduction (MOR) for | ||
Thermo-Elastic Models of Frame Structural Components on Machine Tools. | Thermo-Elastic Models of Frame Structural Components on Machine Tools. | ||
ANSYS Conference & 29th CADFEM Users’ Meeting 2011, October | |||
19-21, 2011, Stuttgart, Germany</ref>. | 19-21, 2011, Stuttgart, Germany</ref>. | ||
| Line 249: | Line 272: | ||
<ref name="LanSB15">N. Lang, J. Saak and P. Benner, <span class="plainlinks">[https://doi.org/10.1007/978-3-319-12625-8_8 Model Order Reduction for Thermo-Elastic Assembly Group Models] </span>, In: Thermo Energetic Design of Machine Tools, Lecture Notes in Production Engineering, 85-92, 2015</ref> | <ref name="LanSB15">N. Lang, J. Saak and P. Benner, <span class="plainlinks">[https://doi.org/10.1007/978-3-319-12625-8_8 Model Order Reduction for Thermo-Elastic Assembly Group Models] </span>, In: Thermo Energetic Design of Machine Tools, Lecture Notes in Production Engineering, 85-92, 2015</ref> | ||
<ref name="Lan17">N. Lang, <span class="plainlinks">[https://www.logos-verlag.de/cgi-bin/buch/isbn/4700 Numerical Methods for Large-Scale Linear Time-Varying Control Systems and related Differential Matrix Equations] </span>, Logos-Verlag, 2018. ISBN: 978-3-8325-4700-4</ref> | |||
<ref name="GalGM15">A. Galant, K. Großmann and A. Mühl, <span class="plainlinks">[https://doi.org/10.1007/978-3-319-12625-8_7 Thermo-Elastic Simulation of Entire Machine Tool] </span>, In: Thermo Energetic Design of Machine Tools, Lecture Notes in Production Engineering, 69-84, 2015</ref> | <ref name="GalGM15">A. Galant, K. Großmann and A. Mühl, <span class="plainlinks">[https://doi.org/10.1007/978-3-319-12625-8_7 Thermo-Elastic Simulation of Entire Machine Tool] </span>, In: Thermo Energetic Design of Machine Tools, Lecture Notes in Production Engineering, 69-84, 2015</ref> | ||
Latest revision as of 07:35, 3 March 2026
| Background | |
|---|---|
| Benchmark ID |
|
| Category |
misc |
| System-Class |
AP-LTV-FOS |
| Parameters | |
| nstates |
16626
|
| ninputs |
6 |
| noutputs |
27 |
| nparameters |
|
| components |
A, B, C, E |
| Copyright | |
| License |
NA |
| Creator | |
| Editor | |
| Location | |
|
NA | |
Description

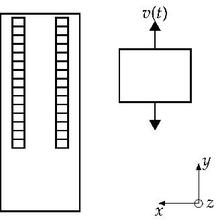
The vertical stand (see Fig. 1) represents a structural part of a machine tool. A pair of guide rails is located on one of the surfaces of this structural part, and during the machining process, a tool slide is moved to different positions along these rails. The machining process produces a certain amount of heat which is transported through the slide structure into the vertical stand. This heat source is considered to be a temperature input at the guide rails. The induced temperature field, denoted by is modeled by the heat equation
with the boundary conditions
- on (surface where the tool slide is moving on the guide rails),
describing the heat transfer between the tool slide and the vertical stand. The heat transfer to the ambiance is given by the locally fixed Robin-type boundary condition
- on (remaining boundaries).
The motion driven temperature input and the associated change in the temperature field lead to deformations within the stand structure. Further, it is assumed that no external forces are induced to the system, such that the deformation is purely driven by the change of temperature. Since the mechanical behavior of the machine stand is much faster than the propagation of the thermal field, it is sufficient to consider the stationary linear elasticity equations
Geometrical dimensions:
Stand: Width ( direction): , Height ( direction): , Depth ( direction):
Guide rails:
Slide: Width: , Height: , Depth:
Discretized Model
The solid model has been generated and meshed in ANSYS. For the spatial discretization the finite element method with linear Lagrange elements has been used and is implemented in FEniCS. The resulting system of ordinary differential equations (ODE), representing the thermal behavior of the stand, reads
with and a system dimension of degrees of freedom and inputs. Note that and are time-dependent matrix-valued functions. That is, the underlying model is represented by a linear time-Varying (LTV) state-space system. More precisely, here the time dependence originates from the change of the boundary condition on due to the motion of the tool slide. The system input is, according to the boundary conditions, given by
The discretized stationary elasticity model becomes
For the observation of the displacements in single points/regions of interest an output equation of the form
is given.
Exploiting the one-sided coupling of the temperature and deformation fields, and reorganizing the elasticity equation in the form , the heat equation and the elasticity model can easily be combined via the output equation. Finally, the thermo-elastic control system is of the form
where the modified output matrix includes the entire elasticity information.
The motion of the tool slide and the associated variation of the affected input boundary are modeled by two different system representations. The following specific model representations have been developed and investigated in [1], [2], [3].
Switched Linear System
For the model description as a switched linear system, the guide rails of the machine stand are modeled as fifteen equally distributed horizontal segments with a height of (see a schematic depiction in Fig. 2). Any of these segments is assumed to be completely covered by the tool slide if its midpoint (in y-direction) lies within the height of the slide. On the other hand, each segment whose midpoint is not covered is treated as not in contact and therefore the slide always covers five to six segments at each time. Still, the covering of six segments does not have a significant effect on the behavior of the temperature and displacement fields. Due to that and in order to keep the number of subsystems small, this scenario will be neglected. Then, in fact eleven distinct, discrete boundary condition configurations for the stand model that are prescribed by the geometrical dimensions of the segmentation and the tool slide are defined. These distinguishable setups define the subsystems
of the switched linear system [4], where is a piecewise constant function of time, which takes its value from the index set . To be more precise, the switching signal implicitly maps the slide position to the number of the currently active subsystem.
Linear Parameter-Varying System
For the parametric model description, the finite element nodes located at the guide rails are clustered with respect to their y-coordinates. This results in distinct layers in y-direction. According to these layers, the matrices are defined in a parameter-affine representation of the form
with the scalar functions selecting the active layers, covered by the tool slide and being the position of the middle point (vertical / y-direction) of the slide. The matrix consists of the discretization of the Laplacian , as well as the discrete portions from the Robin-type boundaries that correspond to the temperature exchange with the ambiance. The remaining summands denote the discretization associated to the moving Robin-type boundaries. For the representation of the input matrix, the summand consists of a single zero column followed by five columns related to the inputs . The remaing matrices are built by a single column corresponding to the different layers followed by a zero block of dimension designated to fit the dimension of .
Note that in general, the number of summands of these representations need not be equal. Still, according to the number of layers, for this example, it holds that . For more details on parametric models, see e.g., [5] and the references therein.
Then, the final linear parameter-varying (LPV) reformulation of the above LTV system reads
Acknowledgement & Origin
The base model was developed [6], [7] in the Collaborative Research Centre Transregio 96 Thermo-Energetic Design of Machine Tools funded by the Deutsche Forschungsgemeinschaft .
Data
Switched System Data
The data file VertStand_SLS.tar.gz contains the matrices
defining the subsystems of the switched linear system. The matrices and are numbered according to the slide position in descending order (1 - uppermost slide position / 11 - lowest slide position).
System dimensions:
Parametric System Data
The data file VertStand_PAR.tar.gz contains the matrices
- and
as well as a file ycoord_layers.mtx containing the y-coordinates of the layers located on the guide rails.
Here contains all columns corresponding to the different layers on the guide rails and correlates to the boundaries where the ambient temperatures act on.
In order to set up the parameter dependent matrices the active matrices and columns associated to the covered layers have to be identified by the current position (vertical middle point of the slide) and the geometrical dimensions of the tool slide and the y-coordinates of the different layers given in ycoord_layers.mtx. Then, has to be set up in the form , where denotes the set of covered layers and their corresponding columns in .
The matrices have been re-indexed (starting with 1) for MORB.
Citation
To cite this benchmark, use the following references:
- For the benchmark itself and its data:
- The MORwiki Community, Vertical Stand. MORwiki - Model Order Reduction Wiki, 2018. https://modelreduction.org/morwiki/Vertical_Stand
@MISC{morwiki_vertstand,
author = {{The MORwiki Community}},
title = {Vertical Stand},
howpublished = {{MORwiki} -- Model Order Reduction Wiki},
url = {https://modelreduction.org/morwiki/Vertical_Stand},
year = 2014
}
- For the background on the benchmark:
@Article{morLanSB14,
author = {Lang, N. and Saak, J. and Benner, P.},
title = {Model Order Reduction for Systems with Moving Loads},
journal = {at-Automatisierungstechnik},
volume = 62,
number = 7,
pages = {512--522},
year = 2014,
doi = {10.1515/auto-2014-1095}
}
References
- ↑ N. Lang and J. Saak and P. Benner, Model Order Reduction for Systems with Moving Loads , in De Gruyter Oldenbourg: at-Automatisierungstechnik, Volume 62, Issue 7, Pages 512-522, 2014
- ↑ N. Lang, J. Saak and P. Benner, Model Order Reduction for Thermo-Elastic Assembly Group Models , In: Thermo Energetic Design of Machine Tools, Lecture Notes in Production Engineering, 85-92, 2015
- ↑ N. Lang, Numerical Methods for Large-Scale Linear Time-Varying Control Systems and related Differential Matrix Equations , Logos-Verlag, 2018. ISBN: 978-3-8325-4700-4
- ↑ D. Liberzon, Switching in Systems and Control , Springer-Verlag, New York, 2003
- ↑ U. Baur, C. A. Beattie, P. Benner, and S. Gugercin, "Interpolatory projection methods for parameterized model reduction", SIAM J. Sci. Comput., 33(5):2489-2518, 2011
- ↑ A. Galant, K. Großmann, and A. Mühl, Model Order Reduction (MOR) for Thermo-Elastic Models of Frame Structural Components on Machine Tools. ANSYS Conference & 29th CADFEM Users’ Meeting 2011, October 19-21, 2011, Stuttgart, Germany
- ↑ A. Galant, K. Großmann and A. Mühl, Thermo-Elastic Simulation of Entire Machine Tool , In: Thermo Energetic Design of Machine Tools, Lecture Notes in Production Engineering, 69-84, 2015